Nach einem langen und kalten Winter ist es so weit: Unter dem Motto Happy Birthday findet vom 26.04.2013 bis 28.04.2013 an der HAW Hamburg der deutsche Eurobotvorentscheid statt, bei dem sich die besten drei Teams für das Finale in La Ferté-Bernard, Frankreich vom 09.05.2013 bis 12.05.2013 qualifizieren können.
Die Wettkämpfe finden am 27.04.2013 ab 10:00 Uhr statt und können, für alle, die nicht in Hamburg sind, per Livestream verfolgt werden. Drückt uns die Daumen.
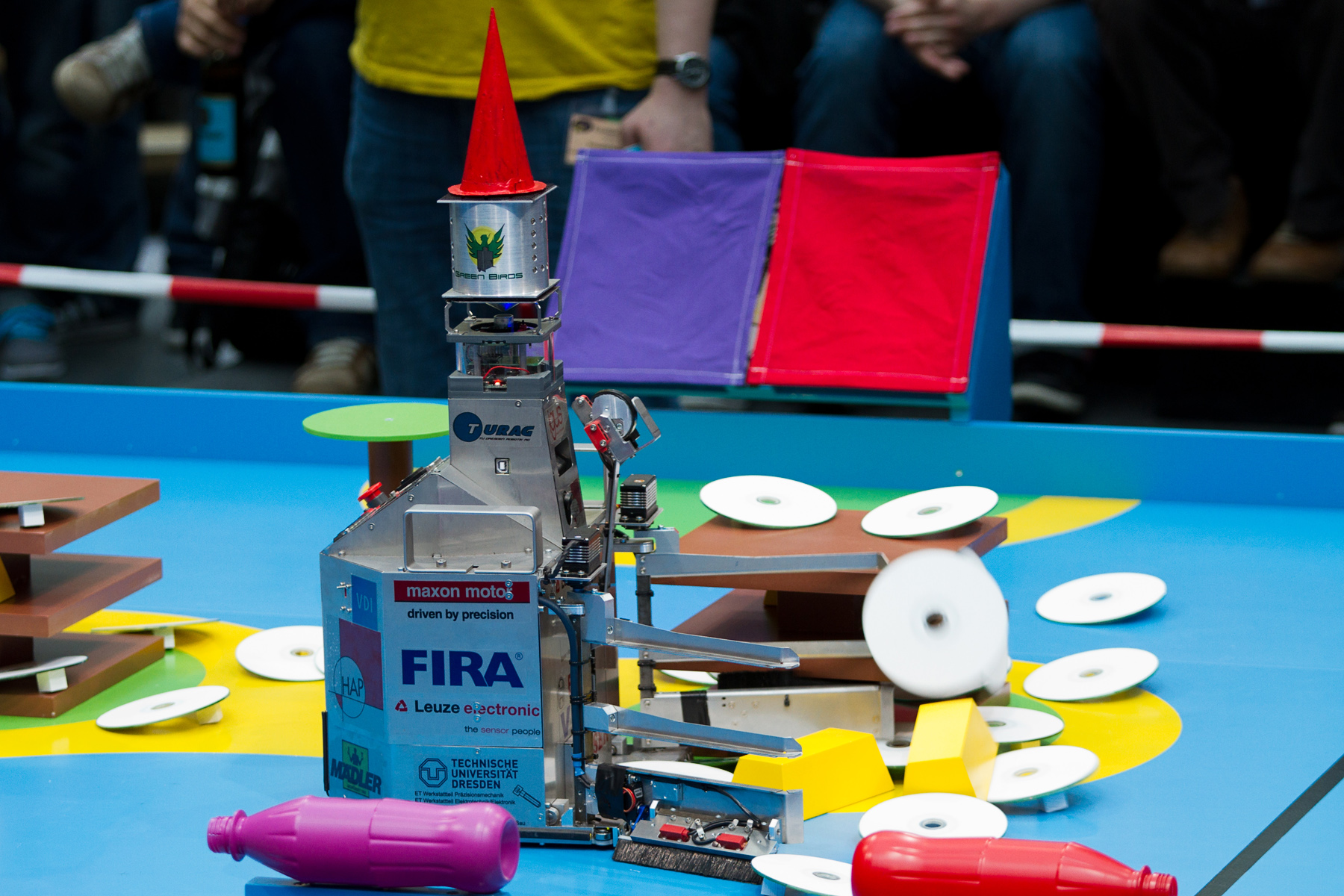
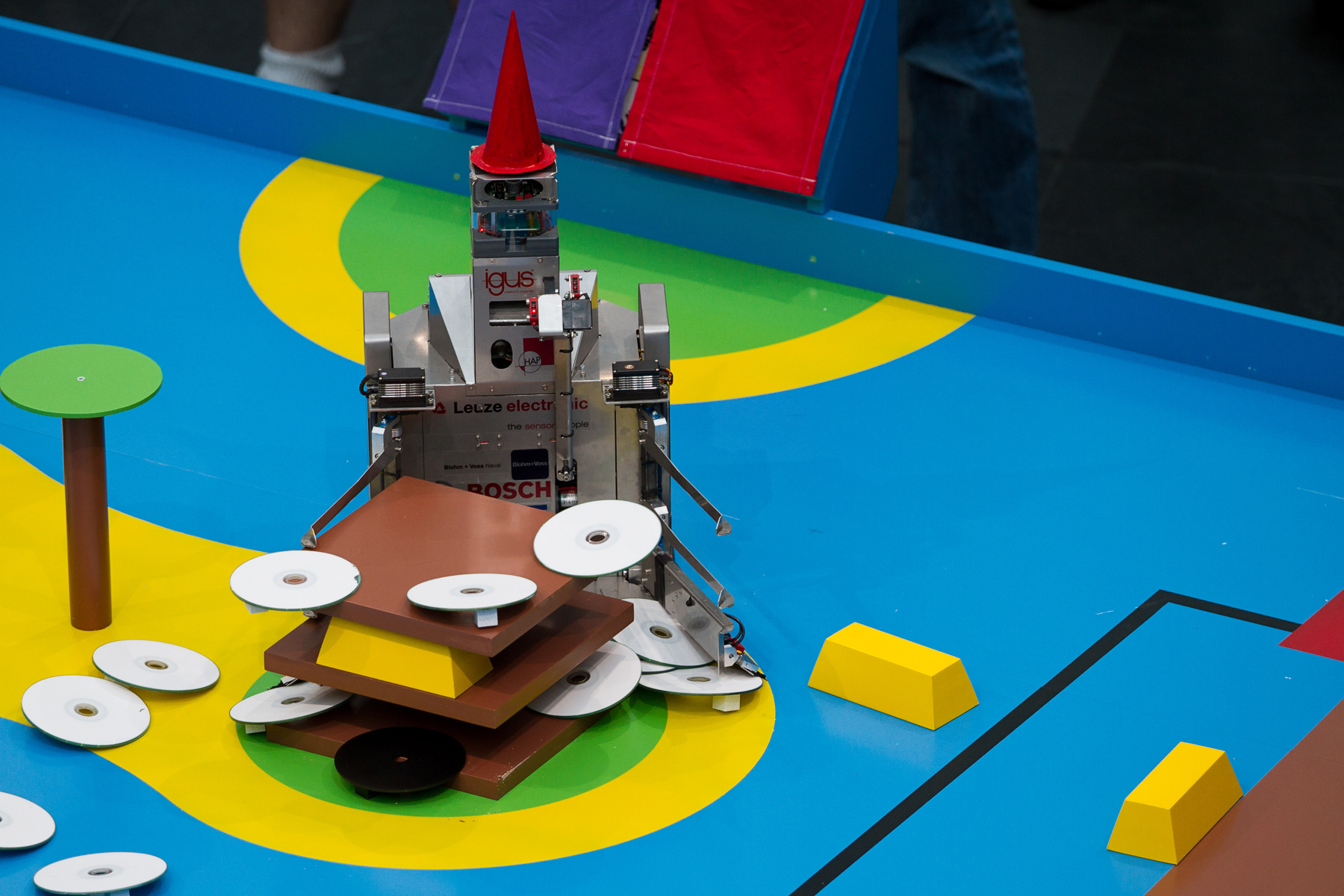
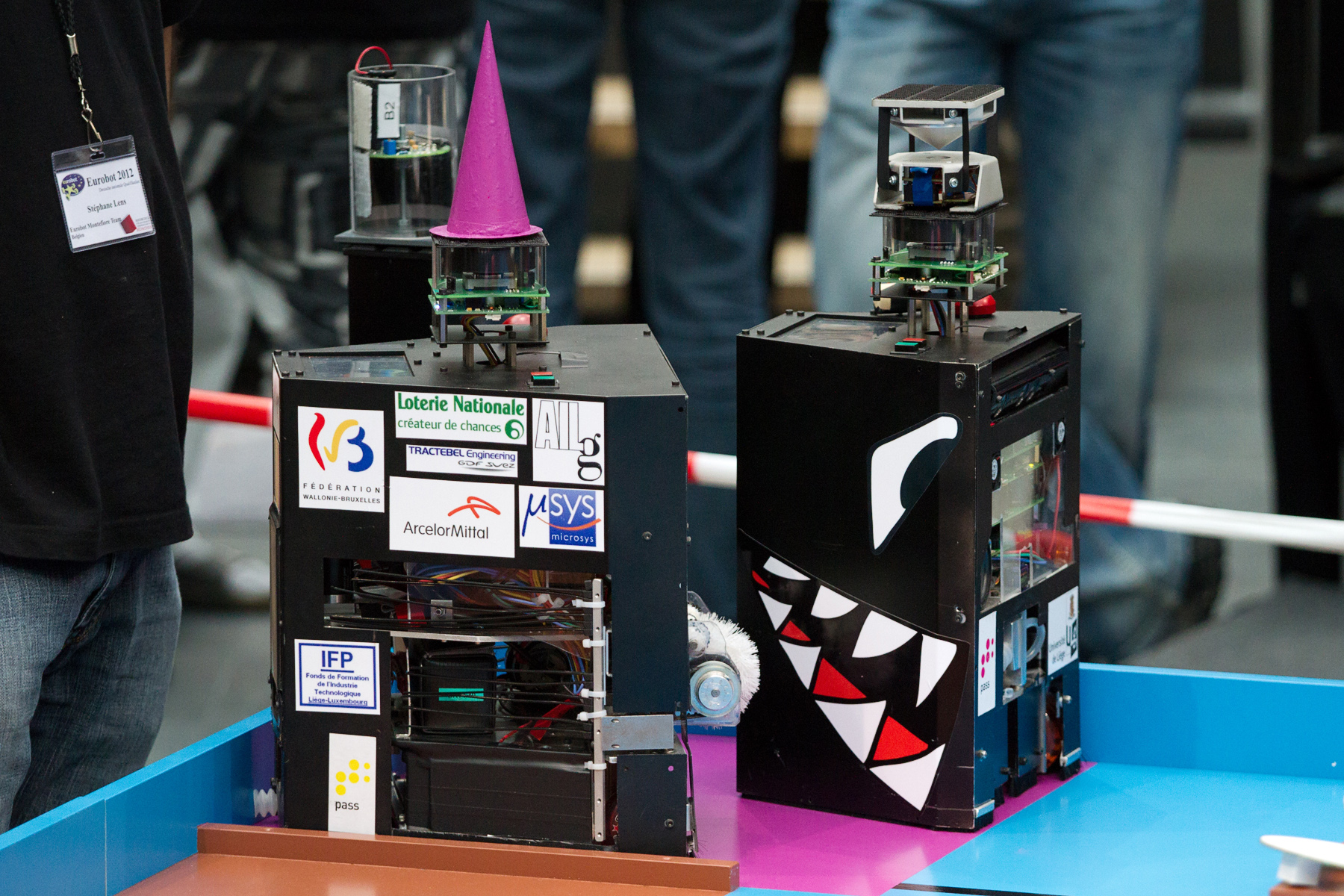
Und hier ist: Das TURAG Team 2013 mit den beiden Robotern Partylöwe und Spaßvogel.