Konstruktion einer möglichst kompakten gefederten Kugelrolle.
Zusammenfassung
Unsere Roboter verfügen über zwei Antriebsräder und stützen sich zusätzlich auf Kugelrollen [1] ab. Für größere Aktoren in der Nähe des Bodens sind diese Rollen oft zu sperrig. Kompakte und in sich gefederte Kugeln sind verfügbar [2] aber bisher noch nicht getestet. Wichtig ist, dass die Kugelrolle trotz kompakter Bauform nicht zu klein wird, um Unebenheiten im Boden ausreichend ausgleichen zu können. Die Steifigkeit der Federung solle möglichst einfach anpassbar sein, damit je nach Fahrverhalten des Roboters nachjustiert werden kann.
Ziel dieses Projekts ist der Aufbau einer kompakten Kugelrollen-Baugruppe mit Federung und einfacher Schnittstelle zur Montage im Roboter.
Aufgaben
Recherche zu möglichen Komponeneten oder fertigen Lösungen
Auch in diesem Jahr haben wir wieder unseren Robotikworkshop zur Sommeruni angeboten. Dabei bieten wir den Schülerinnen und Schülern einen breiten Einblick in das Arbeits- und Forschungsfeld Robotik, zeigen unsere eigene Arbeit in Aktion und lassen im praktischen Teil auch alle selbst etwas löten.
Wir haben an beiden Terminen wieder positives Feedback erhalten und freuen uns aufs nächste Jahr.
Für interessierte Studienanfänger bieten wir einen ähnlichen Workshop auch im Rahmen der ESE an, nähere Infos dazu gibt es beim Fachschaftsrat der Fakultät EuI.
Wir sind zurück aus La Roche-sur-Yon und der Eurobot 2018 damit vorbei. Aber der Reihe nach.
Die heiße Phase des Eurobot begann für uns als deutsches Team kurz vor unserem Nationalentscheid in Dresden. Beim Wettbewerb konnten wir uns dann, nach anfänglichen Startschwierigkeiten, Stück für Stück steigern und schlussendlich den 1. Platz belegen. Für die TURAG hieß das nach einigen Jahren endlich wieder deutscher Meister!
Gruppenfoto nach dem deutschen Vorentscheid
Entsprechend motiviert sind wir in die zweiwöchige Vorbereitungsphase für den internationalen Wettbewerb gestartet. Bei unserem kleinen Roboter Dizzy ging es im wesentlichen darum die Zuverlässigkeit zu steigern und an einigen Stellen Feintuning zu betreiben. An Muck, dem großen Roboter, wurde zwischen den Wettbewerben noch deutlich mehr gearbeitet. Entsprechend der diesjährigen Regeln war es wichtig das am Rand befindliche Farbmuster zu erkennen um Bonuspunkte auf die gebauten Türme zu erhalten. Unser ursprüngliches Konzept dafür mussten wir wegen Zeitmangels verwerfen und haben stattdessen Muck mit einer Webcam zur Mustererkennung ausgestattet. Das System funktioniert trotz der kurzen Entwicklungs- und Tetstzeit sehr zuverlässig und ermöglicht es noch mehr Punkte im Wettbewerb zu erzielen.
Muck erkennt das Farbmuster links und baut es korrekt in die Türme ein
Der internationale Entscheid des Eurobot wurde, wie schon im letzten Jahr, wieder gemeinsam mit dem französischen „Coupe de Robotique“ in La Roche-sur-Yon in Frankreich ausgetragen. Ähnlich wie beim deutschen Wettbewerb liefen die Spiele hier etwas schleppend an, wir konnten die Leistung unserer Roboter aber von Spiel zu Spiel steigern. Auch ein kleines Feuer an einem Modellbau-Servomotor im Spiel und der daraus resultierende Notaus konnten Muck und Dizzy nicht aufhalten. Trotz dieser mit 0 Punkten gewerteten Vorrunde platzierten wir uns nach der Qualifikation noch auf einem guten 12. Platz. Im Achtelfinale des KO-Systems schieden unsere Roboter leider mit 111 zu 181 Punkten aus. Hier kamen verschiedene Faktoren zusammen: an einigen Stellen mangelte es unseren Robotern am letzten Quäntchen Zuverlässigkeit, an anderer waren die Toleranzen der Plattenaufbauten etwas zu groß.
Wettbewerbsplatten beim Eurobot Finale
Alles in allem sind wir mit unserer Leistung und der unserer Roboter in diesem Jahr aber sehr zufrieden. Mit über 400 möglichen Punkten waren unsere Roboter in einem idealen Spiel in der Lage soviele Punkte wie kein anderes der knapp 200 anwesenden Teams zu erzielen. Wir haben wieder viel gelernt und stecken schon voller neuer Ideen für die nächste Saison. Das Thema wird dann „Atom Factory“ sein. Über unsere zahlreichen Sommerprojekte wird hier an geeigneter Stelle sicher auch informiert.
Please accept YouTube cookies to play this video. By accepting you will be accessing content from YouTube, a service provided by an external third party.
Nachdem wir vor zwei Wochen in der Schweiz und in den letzten beiden Tagen bei uns in Dresden schon zwei Wettbewerbe hinter uns haben, ist es dringend an der Zeit unsere aktuellen Roboter einmal etwas genauer vorzustellen. Die Planungs- und Entwicklungsphase können wir dabei eigentlich gleich überspringen und zu den fertigen Robotern kommen.
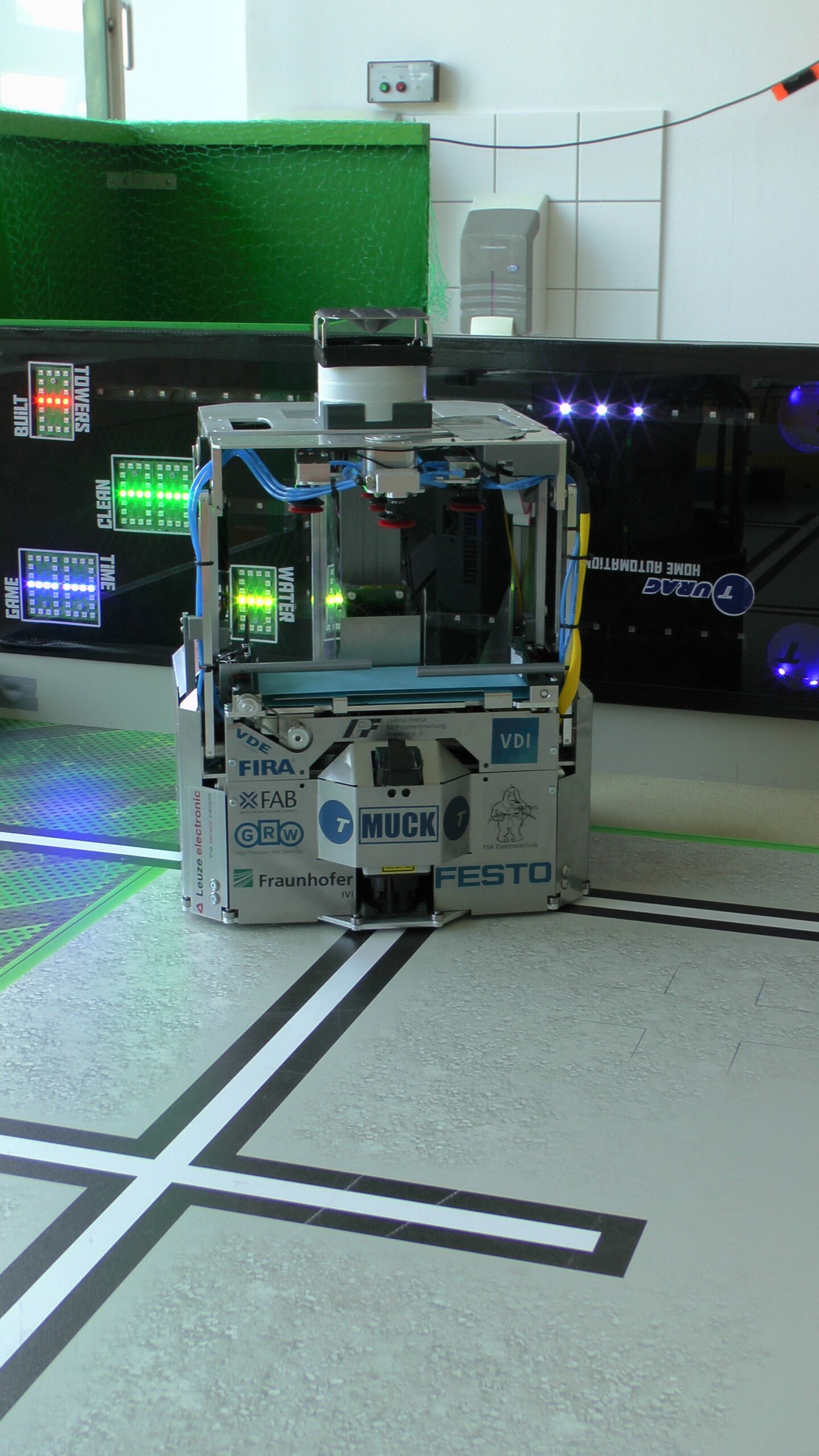
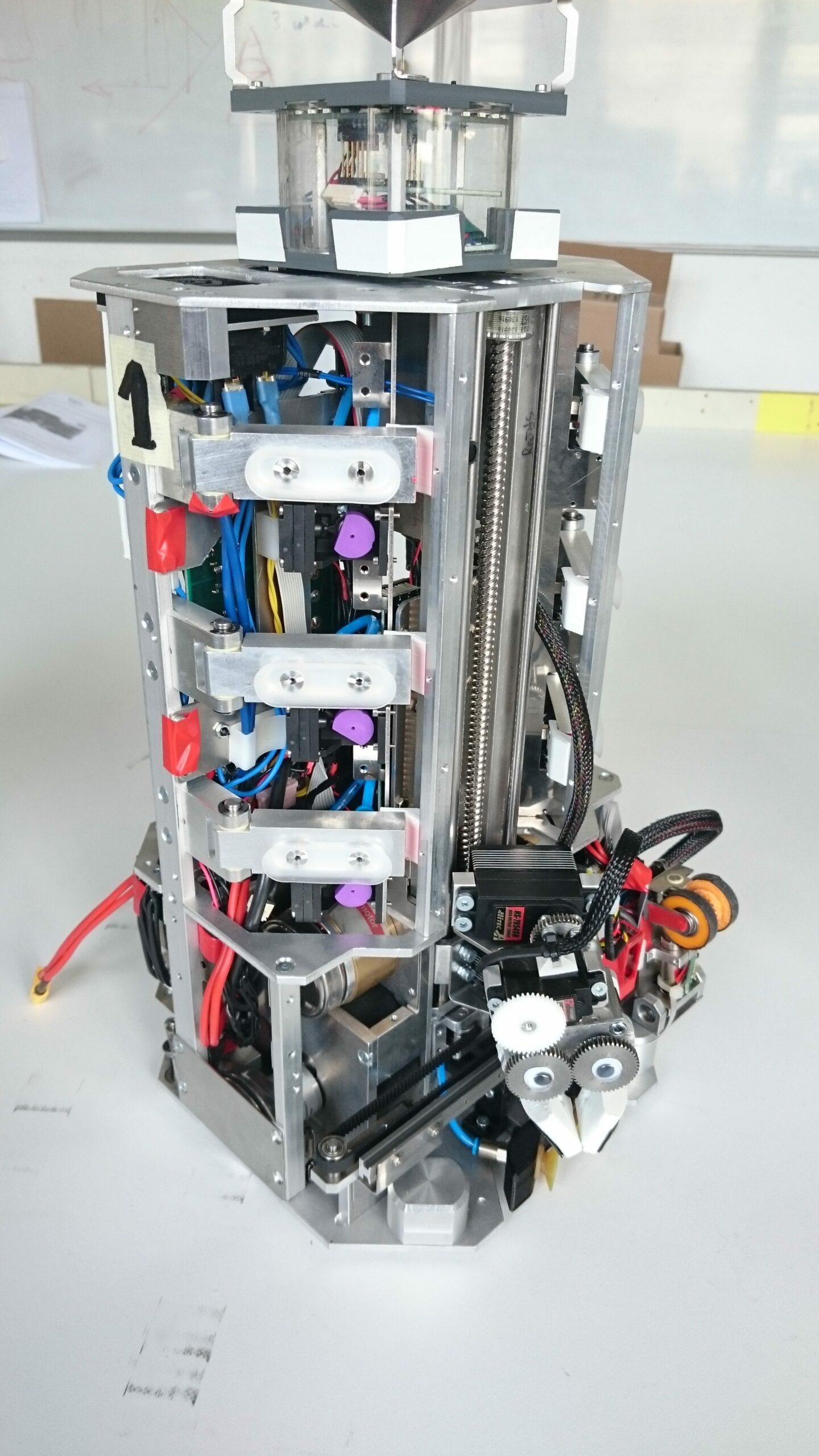
Roboter A: Muck
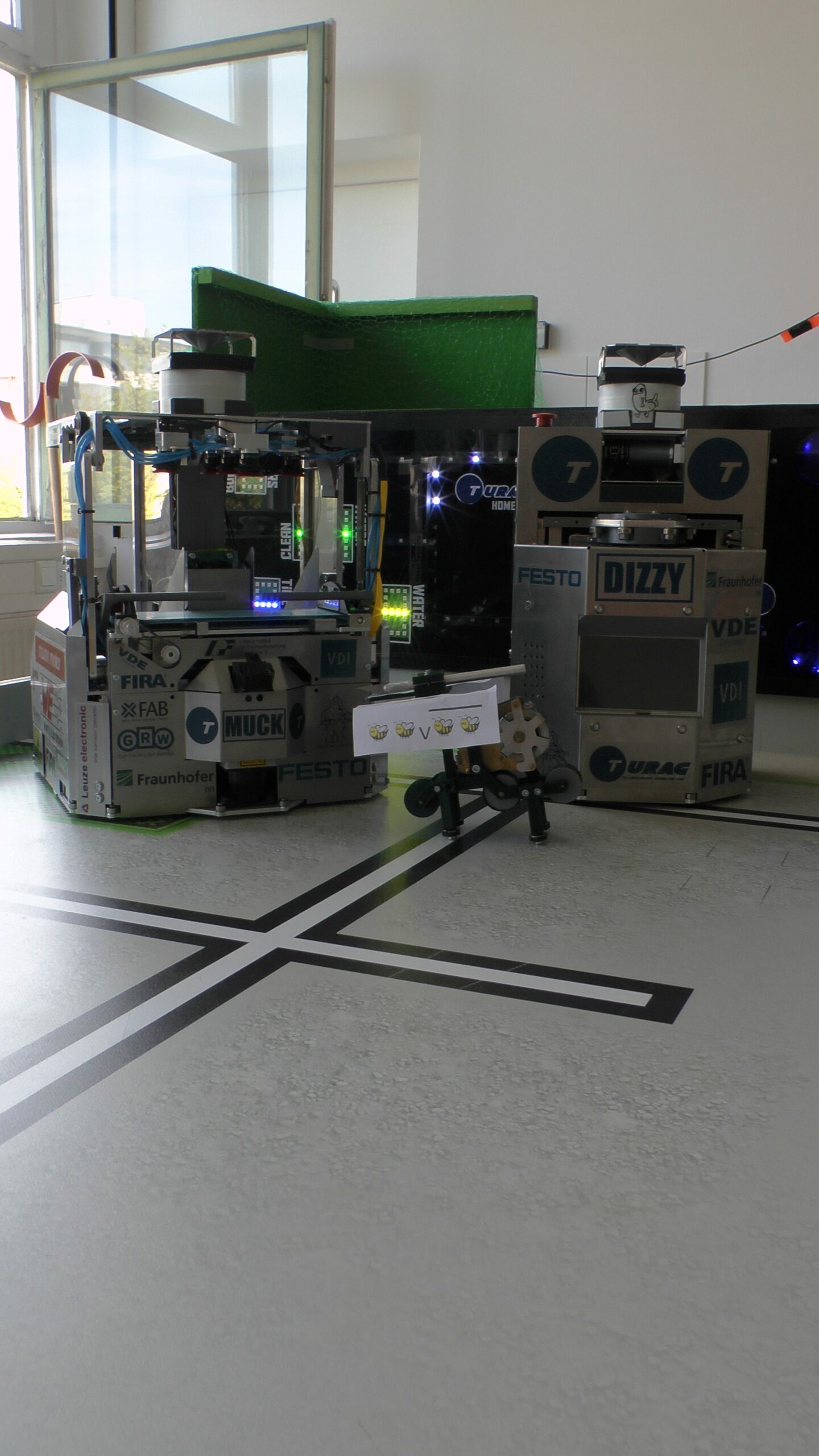
Muck
Muck ist unser großer Roboter. Seine primäre Aufgabe ist es die auf dem Spielfeld verteilten Würfel einzusammeln und daraus Türme zu je fünf Würfeln zu bauen. Er ist dazu mit einem großen Kran ausgestattet, der eine komplette 5er Kombination von Würfeln ansaugen, heben und drehen kann. Entsprechend der vorgegebenen Farbmuster lässt Muck die Würfel in der richtigen Reihenfolge auf sein Förderband fallen und schiebt sie von dort auf die seitlich angebrachten Rutschen. Er kann auf diese Weise bis zu zehn Würfel einsammeln und dann durch das Aufrichten der Metallrutschen in Türme verwandeln.
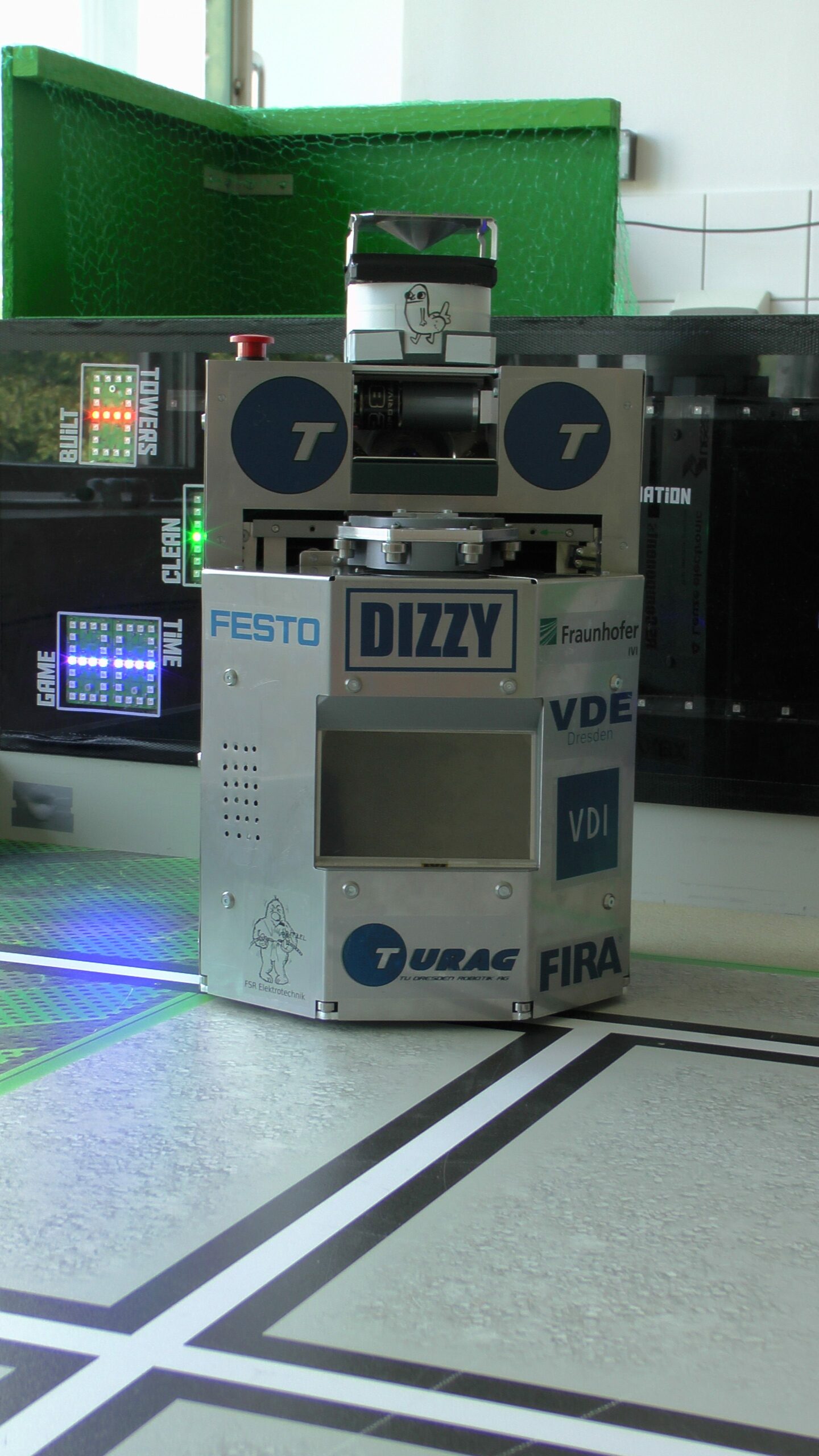
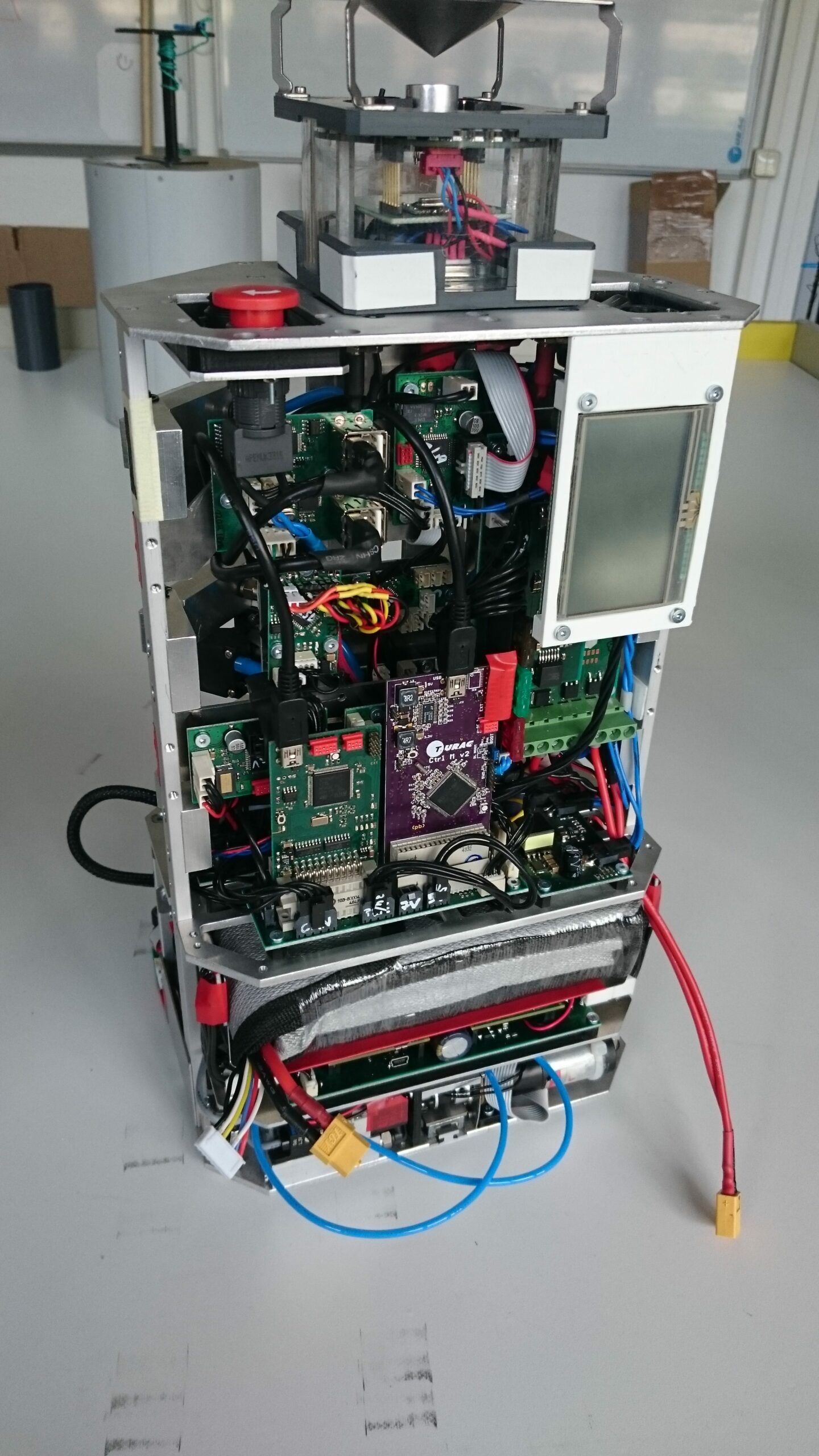
Roboter B: Dizzy
Dizzy
Dizzy, der kleine Roboter, übernimmt das Ausleeren der Wasser-Rekuperatoren. Er öffnet dazu das Ventil und sortiert die darin enthaltenen Bälle in einen Revolver mit 8 Kammern ein. Entsprechend der Farbe der Bälle lässt er sie dann entweder an der Seite einfach in ein Schmutzwasserbecken rollen, oder er bringt sie zurück zum eigenen Wasserturm um dort Frischwasser zu sammeln. Da der Wasserturm höher als die zulässige Bauhöhe des Roboters ist verfügt Dizzy über einen Schussmechanismus, der die Bälle wie bei einer Tennisballschussmaschine beschläunigt und treffsicher in den Behälter befördert.
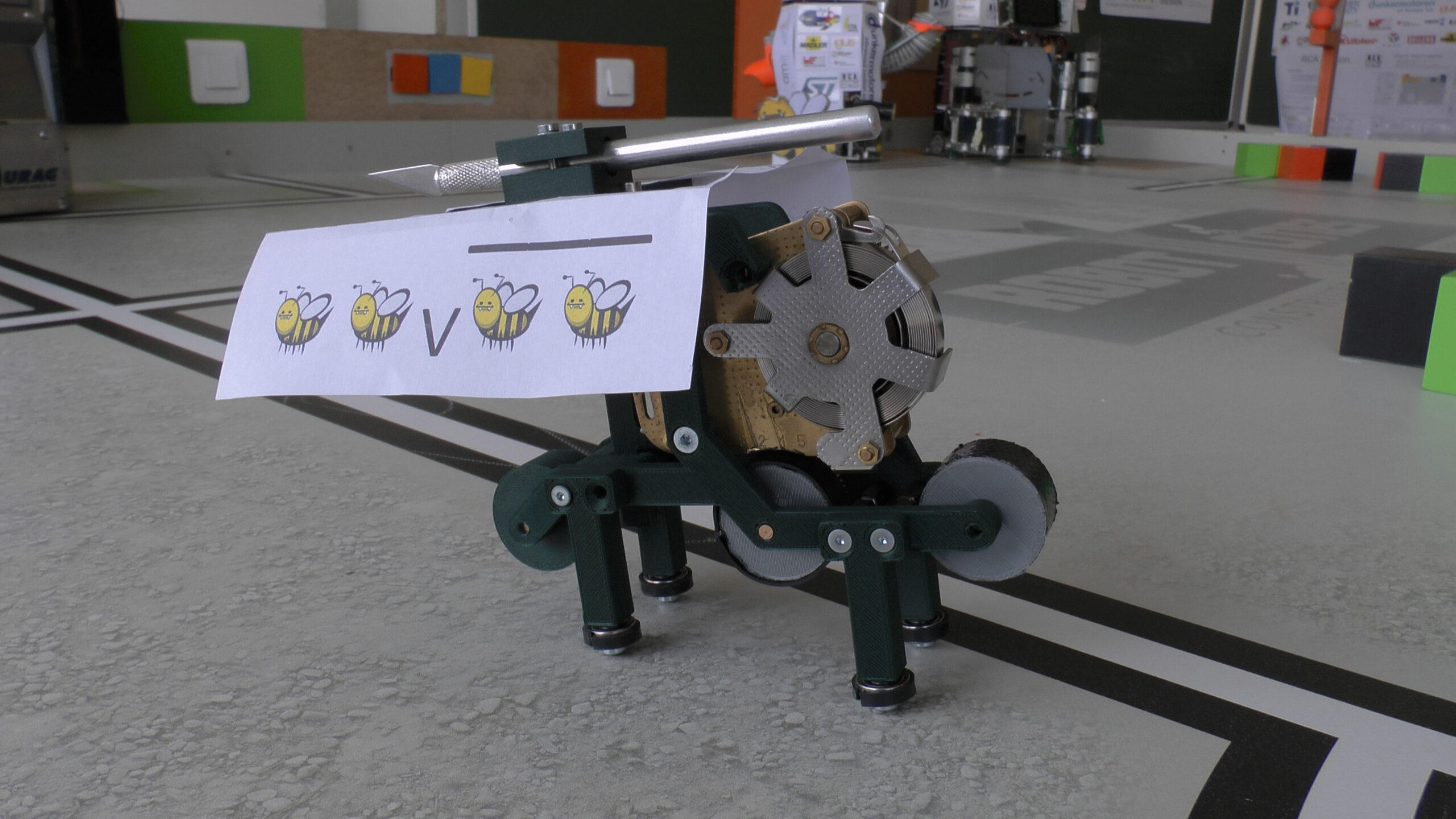
Die Roboterbiene: Sir Lanzelot Neu in diesem Jahr war die Aufgabe eine rein mechanisch angetriebene Roboterbiene zu bauen. Ihre Aufgabe ist es mit einen vorgegebenen Pfad entlangzufahren und am Ende einen Ballon zum Platzen zu bringen, nachdem ein Roboter sie aktiviert hat. Sir Lanzelot besteht im Kern aus dem Aufziehmechanismus eines Fischfutterautomaten den wir so umgebaut haben, dass er durch ein leichtes Tippen auf den Kopf ausgelöst wird und ein Rad antreibt .
Die Bien „Sir Lanzelot“
Das Home-Automation-Panel Das Home-Automation Panel, kurz HAP, darf laut Regeln in beliebiger Art und Weise auf sich aufmerksam machen wenn es von einem Roboter eingeschaltet wird. Wir haben uns dafür entschieden auf dem Panel Informationen über das laufende Spiel anzuzeigen. So sollen zum Beispiel die Anzahl der gestapelten Würfel und der gesammelten Bälle dort angeueigt werden.
Das HAP
Beim Deutschen Wettbewerb haben wir dieses Wochenende den 1. Platz belegt und uns damit gemeinsam mit dem RCHH aus Hamburg und dem Team MAI aus Markt Indersdorf für die Teilnahme am Internationalen Entscheid in Frankreich qualifiziert.
Unter dem Motto „Robot Cities – built a better world“ gilt es für uns auch in diesem Jahr wieder zwei Roboter zur Teilnahme am Eurobot zu entwerfen. Die Entwicklung ist schon in vollem Gange, zunächst aber etwas zu den diesjährigen Aufgaben:
Neues Thema: Robot Cities
Wie immer treten beim Eurobot zwei Teams mit jeweils bis zu zwei Robotern auf dem bekannten 2x3m Feld gegeneinander an, die Teamfarben sind Orange und Grün. Das Setting gibt dieses Jahr vor, dass die Roboter Städte errichten und dabei besonders auf ihre Umwelt achten müssen.
Die Wettbewerbsumgebung in dieser Saison
Für die Roboter selbst gibt es zwei wesentliche Aufgaben:
Beipiele für „Häuser“ im Hintergrund das „Home automation panel“
1. Die in 5er Kombinationen auf dem Feld verteilten Würfel stellen Baumaterial zum Errichten von Häusern dar (zum Beispiel sind blaue Würfel Solarmodule). Die Würfel müssen entsprechend vom Roboter aufgesammelt und zu einem Turm gestapelt in der Bauzone am oberen Ende des Spielfelds abgestellt werden, je höher das Haus desto besser. Wie genau Häuser aufgebaut werden müssen ändert sich jede Runde, die aktuelle Vorgabe muss der Roboter anhand des am Rand angebrachten Farbcodes erkennen und in seinen Bauwerken entsprechend umsetzen.
2. Es müssen Wasserbehälter am Rand des Spielfelds geleert und das Wasser in die richtigen Behälter umgefüllt werden. Echtes Wasser gibt es dieses mal nicht, dafür dienen Schaumstoffbälle als Ersatz. Die Bälle in der Farbe des konkurierenden Teams stellen Abwasser dar und müssen am vorderen Tischende in eine Kläranlage entladen werden, von dort kann sie der gegnerische Roboter dann wieder einsammeln, schließlich hat das Wasser in seinem Fall die eigene Teamfarbe und ist somit „sauber“. Nutzbares Wasser, also Bälle der eigenen Teamfarbe, müssen in die großen Wassertürme am oberen Ende der Wettkampfplatte entladen werden. Schwierig ist hierbei die Höhe der Öffnungen 400mm oberhalb des Tisches, die Bälle müssen deshalb vom Roboter aus abgeschossen werden.
Neu sind in diesem Jahr zwei zusätzliche Aufgaben:
Jedes Team muss ein „Home automation panel“ entwerfen, dass nur eigens entwickelte Elektronik enthalten darf und über einen Schalter am oberen Ende der Platte vom Roboter aktiviert wird. Bei der Umsetzung dieses Panels sind der Kreativität keine Grenzen gesetzt.
Außerdem verfügt jedes Team über eine Biene. Diese muss rein mechanisch sein und darf keine elktronischen Bauelemente enthalten. Die Biene wird von einem Roboter aktiviert und muss dann selbstständig auf dem schmalen Rand am unteren Ender des Spielfeldes entlang fahren um vor Beendigung des Spiels die „Blume“ in Form eines Ballons zu erreichen und diesen platzen zu lassen.
Übersicht über alle Spielelemente
Außerdem gibt es einige Neuerungen bei den Gegnererkennungssystemen und anderen Vorschriften, dazu kommen wir im Laufe der Saison noch.
Während die meisten Studenten noch in der Prüfungsphase stecken und die kommenden Semesterferien kaum erwarten können, verschlägt es in den Sommerferien immer wieder einige Schülerinnen und Schüler aus ganz Deutschland an die TU Dresden um an der „Sommeruniversität“ teilzunehmen. Dabei können Interessierte eine Woche lang Einblicke in das Studium der MINT-Fächer erhalten und gleichzeitig mit Studierenden in Kontakt kommen.
Auch die TURAG führt einen der zahlreichen angebotenen Workshops durch. Bei uns geht es natürlich wenig überraschend um das Thema Roboter. So haben interessierte Schülerinnen und Schüler an den letzten beiden Donnerstagen von uns einen kurzen Einblick in das große Forschungsgebiet der Robotik erhalten. Neben einem sehr breit gefächerten Vortrag gab es natürlich auch einen Teil unserer eigenen Arbeit live und in Farbe zu sehen. Nach diesem eher passiven Teil folgte noch die Praxis, dabei durfte ein einfacher Musikplayer, bestehend aus einem IC, einigen THT Bauelementen und einem kleinen Lautsprecher auf Lochrasterkarte gelötet werden. Einen ganzen Roboter schafft man an nur einem Nachmittag nunmal leider nicht.
Auch wir haben am Abend dann noch die Möglichkeit genutzt uns in gemütlicher Atmosphäre und bei gutem Essen beim Stura mit den Schülern über Fragen, Vorstellungen und Wünsche bezüglich des Studiums auszutauschen.
Am Mittwoch waren wir bei der Festveranstaltung „125 Jahre VDE Dresden“ zu Gast. Wir haben dazu unsere Wettbewerbsplatte im Hilton Hotel Dresden aufgebaut und die beiden Roboter aus dem Jahr 2017 vorgestellt. Es fand ein reger Austausch und viele anregende Gespräche mit den anwesenden Gästen statt. Außerdem konnten wir auch einige nützliche Tipps mit nachhause nehmen.
Auch bei der nächsten Jubiläumsfeier sind wir gerne wieder dabei.
Die Eurobot Saison 2017 ist vorbei, der Mond wurde erfolgreich besiedelt. Aber von vorne:
Wie im letzten News Beitrag beschrieben haben wir beim Deutschen Wettbewerb den 3. Platz belegt und uns damit für den internationalen Wettbewerb in La-Roche-Sur Yon qualifiziert.
Alle deutschen Teams und unsere Gäste aus der SchweizScotty und Kirk nach dem deutschen WettbewerbKirk mit seinen zwei neuen Greifern
Danach folgten für uns noch drei intensive Wochen zur Vorbereitung auf Frankreich. Scotty wurde Antriebsseitig optimiert um die starken Regelungsprobleme, die uns dazu bewegt hatten beim deutschen Wettbewerb nur einen Roboter zu nutzen, zu beheben. Kirk erhielt noch zwei weitere Aktoren, die nicht rechtzeitig zum deutschen Wettbewerb fertig geworden waren, um damit Lunar-Module zu sammeln und entsprechend ihrer Farbe korrekt zu drehen. Das ausladen der eingesammelten Styroporbälle haben wir mit einigen Tricks soweit verbessert, dass die Bälle in den Korb geschossen werden konnten ohne nochmal zurück über die Wippe fahren zu müssen. Außerdem wurde viel getestet und optimiert.
Die Turag hat es in eine französische Zeitung geschafft
Der internationale Eurobot fand in diesem Jahr gemeinsam mit dem Coupe de France in La-Roche-Sur Yon statt. Insgesamt waren bei dem Event damit über 200 Teams begeistereter Roboterbauer anwesend. Dadurch boten sich zahlreiche Möglichkeiten zum Austausch mit anderen Teams. Die Fahrt war recht lang und von einigen Komplikationen geplagt, umso schöner dann natürlich das Ankommen und erstmalige betreten der prall mit Robotern gefüllten Hallen. Unsere ersten Testspiele sorgten aber leider zunächst für Ernüchterung. Unsere Roboter vertrugen sich auf dem Spielfeld nicht mehr und behinderten sich stattdessen gegenseitig, Grund für die Probleme war ein defektes Bluetooth-Modul. Die ersten beiden Vorrunden musste Kirk deshalb, wie schon zum deutschen Wettbewerb, leider allein bestreiten. Zwei durchprogrammierte Nächte zahlten sich später allerdings aus, das Problem konnte anderweitig gelöst und beide Roboter eingesetzt werden, um mehr Punkte in den Qualifikationsrunden zu sammeln. Nach den Vorrunden lagen wir als bestes deutsches Team auf Platz 14 in der Gesamtwertung und waren damit für die Finalrunden qualifiziert. In der ersten K.O. Runde schieden Scotty und Kirk leider gegen das serbische Team M41+ aus. Die Serben kämpften sich danach noch weiter nach vorne und belegten hinter dem Sieger RCVA aus Frankreich schlussendlich den zweiten Platz.
Auch dieses mal war der Abschluss des Eurobots wieder eine wertvolle Erfahrung für unser Team. Der Austausch mit anderen hat einige neue Ideen geliefert, der Wettbewerb selbst hat gezeigt unserer diesjährigeni Konzepte funktionieren und welche nicht.
kreative Roboter
Moderatoren
Scotty und Kirk nach einem Spiel
Der Wettkampfort
zahlreiche Tests
Maskottchen
Es gab auch in diesem Jahr wieder einen kleinen Hinweis auf die Regeln für die Saison 2018: „Robot Cities“. Es soll darum gehen mit Robotern Städte zu bauen und dabei besonders dynamisch auf Umwelteinflüsse und die umgebende Natur zu achten. Außerdem Soll das Spielfeld ein wenig abgewandelt und ein weiteres Bakensystem eingeführt werden, wodurch sich die Auswertung dessen was auf dem Feld passiert verbessern lässt. Näheres dazu erfahren wir dann aber Ende September.
Please accept YouTube cookies to play this video. By accepting you will be accessing content from YouTube, a service provided by an external third party.
In 10 Tagen ist der deutsche Wettbewerb und unsere Roboter Scotty und Kirk müssen zeigen was sie können. Für uns bedeutet das jetzt nochmal Vollgas zu geben.
Kirk erhält noch einige Teile, dann sammelt er fleißig Mondgestein.
… ohne Außenbleche lässt es sich in der Testphase viel besser am Roboter arbeiten
Manchmal schaut Scotty noch etwas verwirrt aber das legt sich mit dem Training.
So soll Scotty mal aussehen
… und so Kirk
Scotty sammelt auf unserer Testplatte schon fleißig Punkte, während Kirk noch den letzten Schliff erhält. Es gibt auf jeden Fall noch jede Menge Raum für Feintuning, so dass uns in den nächsten Tagen sicher nicht langweilig wird. Im Laufe der Woche bekommen die beiden dann auch noch ihre Außenbleche inklusive Sponsorenlogos, zum testen ist das ganze leider meistens eher unpraktisch.
Im Rahmen einer Exkursion hatten wir diese Woche eine Klasse der Semper Fachoberschule Dresden in unserem Labor zu Gast. In einem etwa zweistündigen Programm haben die Schüler der Klassenstufen 11 und 12 eine Einführung in das Thema Robotik allgemein und natürlich in unsere eigene Arbeit erhalten. Wir haben versucht ein möglichst breites Themenfeld abzudecken und von konstruktiven Grundlagen der Aktorik über deren elektrische Ansteuerung bis hin zur intelligenten Programmierung die Funktionen des Roboters erklärt und gezeigt. Die Schüler haben so einen praktischen Einblick in technische Studiengänge und Berufe erhalten. Nach eigener Aussage der Schüler war der Ausflug durch seine Anknüpfung und das Vertiefen des Unterrichtsstoffs sehr motivierend.
Wir freuen uns schon auf die zweite Klasse, die uns in zwei Wochen besuchen wird.

 Konstruktion einer möglichst kompakten gefederten Kugelrolle.
Konstruktion einer möglichst kompakten gefederten Kugelrolle.