

Ist da die TURAG? Nein hier ist Thaddäus!
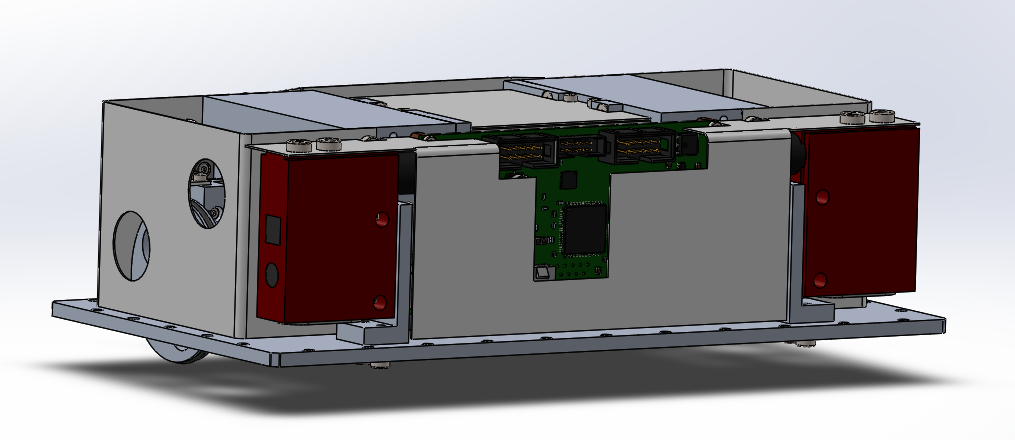
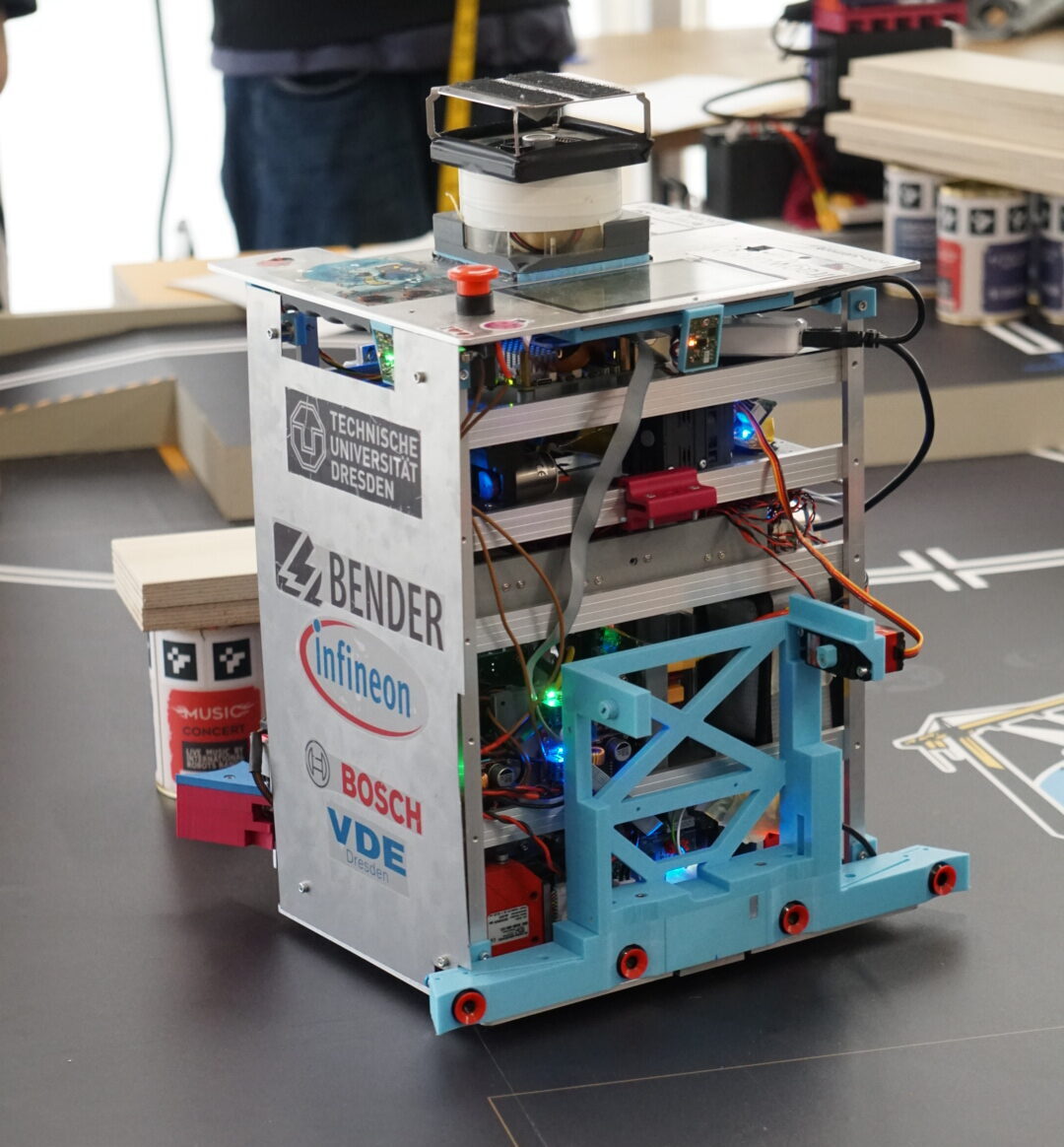
Die Zeit rennt wieder und die erste Hälfte der Eurobotsaison 2026 liegt bereits hinter uns. Nach vielen Ideen, Diskussionen, CAD-Sessions und der einen oder anderen Mate steht unser neuer Hauptroboter nun fest: „Thaddäus“ ist vollständig designt und seine Einzelteile befinden sich aktuell in der Fertigung. Noch existiert er hauptsächlich digital, aber das wird sich hoffentlich bald ändern. Hier habt ihr schon mal ein erstes Bild wie Thaddäus aussehen wird: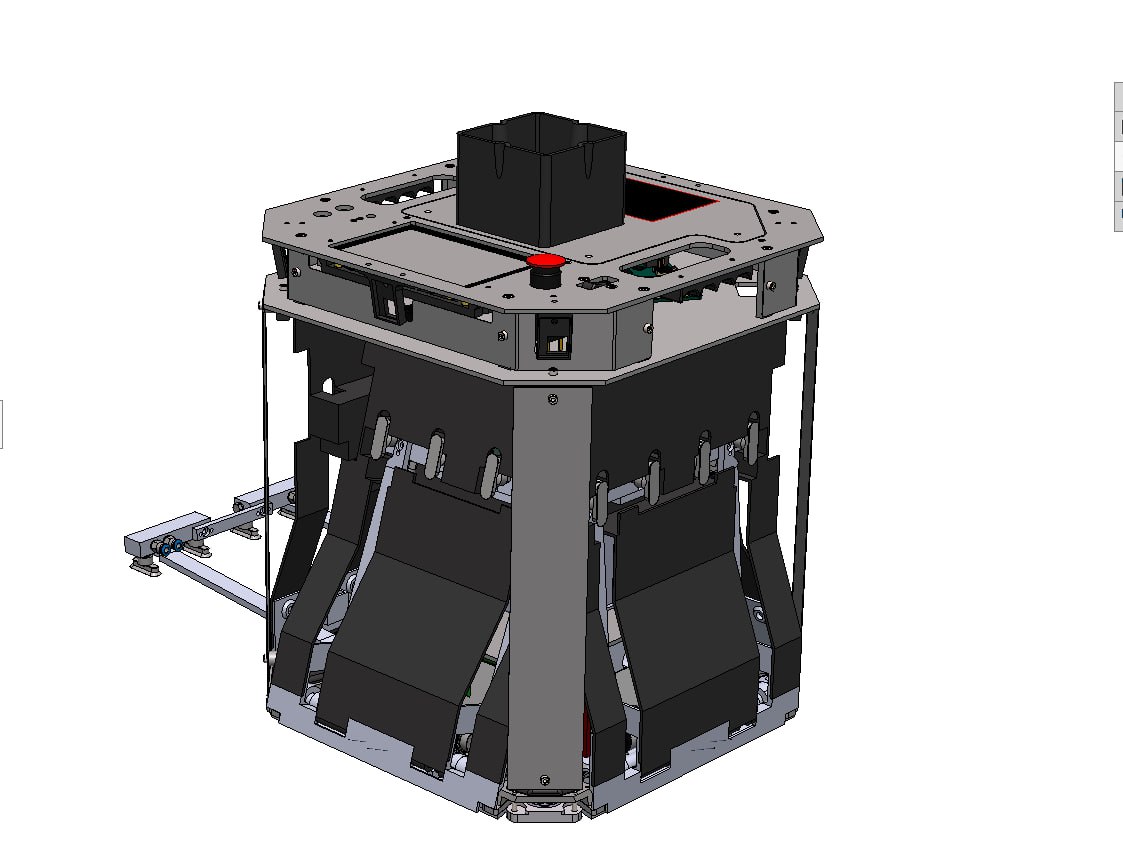
Funktionsweise
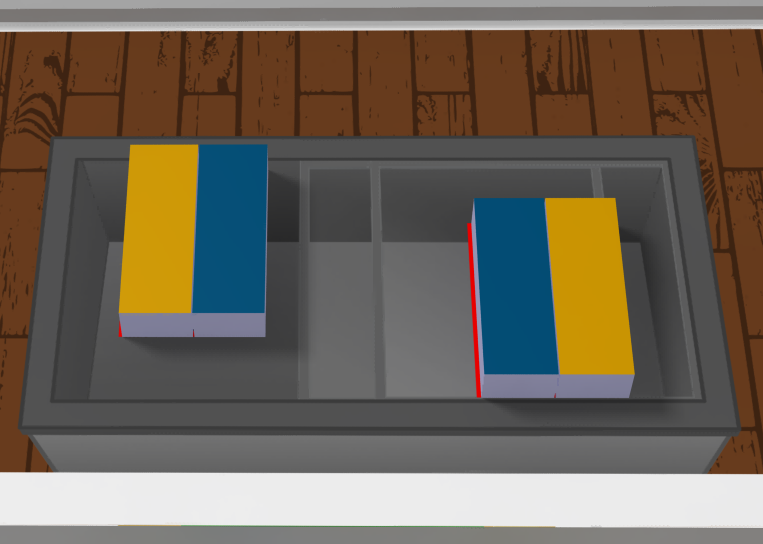
Ein zentrales Element von Thaddäus ist das Greifersystem an der Front. Dort kommen insgesamt 16 Sauger zum Einsatz, die über ein pneumatisches System angesteuert werden. Kleine Pumpen erzeugen dabei einen Unterdruck, mit dem die zweifarbigen Holzsteine angesaugt und sicher festgehalten werden. Jeder Sauger lässt sich einzeln kontrollieren, sodass Steine gezielt aufgenommen, gehalten oder wieder abgeworfen werden können. Sensoren und Ventile sorgen im Hintergrund dafür, dass alles möglichst zuverlässig funktioniert und dass eingesammelte Steine nicht ungeplant den Weg zurück aufs Spielfeld finden.
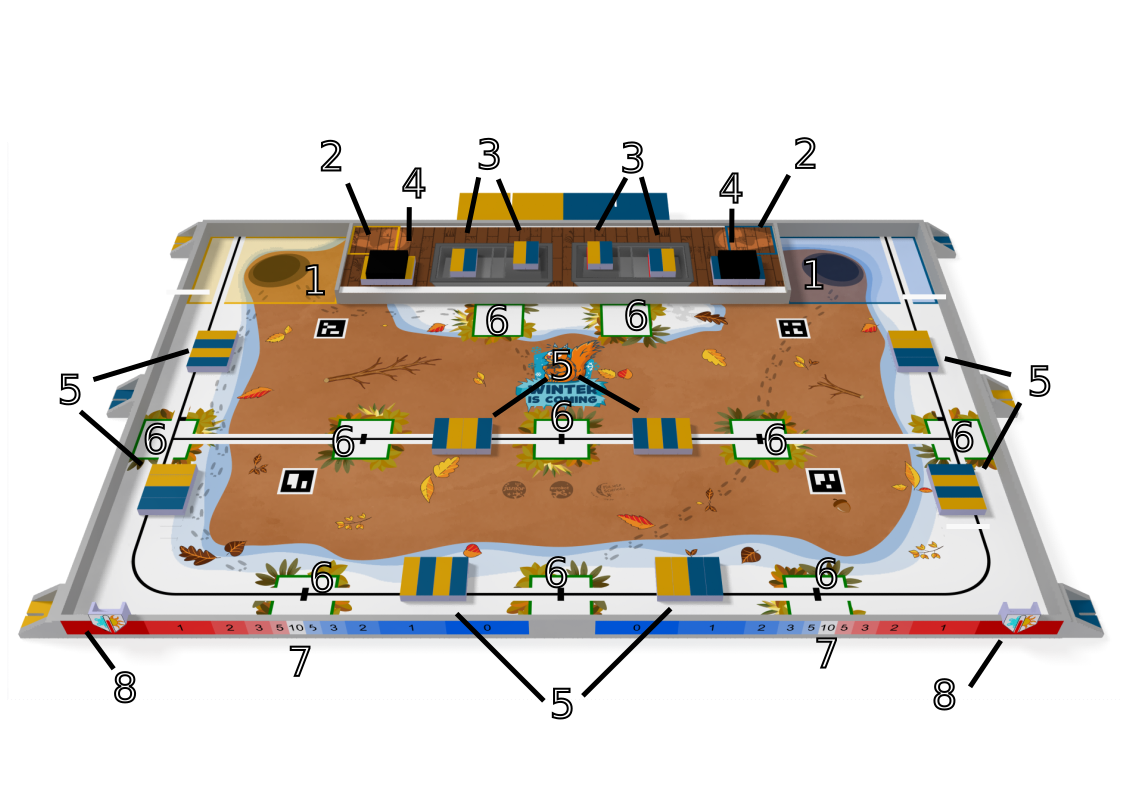
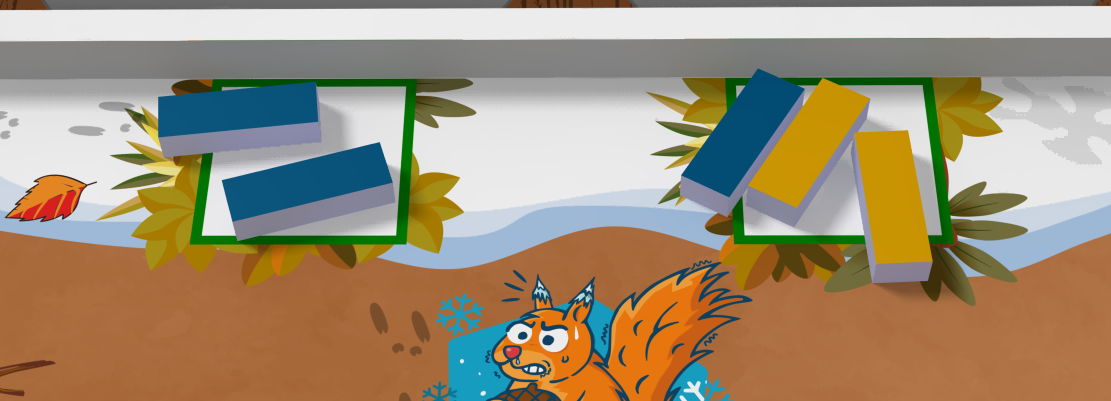
In dieser Saison dreht sich alles um die richtige Vorbereitung auf den Winter. Unsere Aufgabe: zweifarbige Holzsteine aufnehmen, nach Farben sortieren und an definierten Stellen ablegen. Mehr dazu findet ihr in unserem Beitrag zu den diesjährigen Regeln.
Sandy
Natürlich dürfen auch in diesem Jahr unsere SIMAs nicht fehlen – diesmal sogar in zwei Varianten. Neben den klassischen SIMAs gibt es einen großen Ninja-SIMA namens Sandy, der unabhängig vom Hauptroboter in seiner eigenen Zone agiert. Dort führt er selbstständig Aktionen aus und sammelt am Ende des Matches zusätzliche Punkte – quasi als stiller Punktesammler im Hintergrund.
Gemeinsam mehr erreichen
Besonders freuen wir uns, dass wir in dieser Saison mit einem für unsere Verhältnisse großen Team arbeiten können. Auch wenn das manchmal für längere Diskussionen sorgt, ermöglicht es uns, komplexere Mechanismen umzusetzen und die Arbeit sinnvoll aufzuteilen.
Wir sind gespannt, was der Rest der Saison noch für uns bereithält und wie sich Thaddäus, Sandy und die SIMAs am Ende auf dem Spielfeld schlagen werden.